


| one stage | two stage | |
| Gear Ratio | 4,5,8 | 16,20,25,32,40,64 |
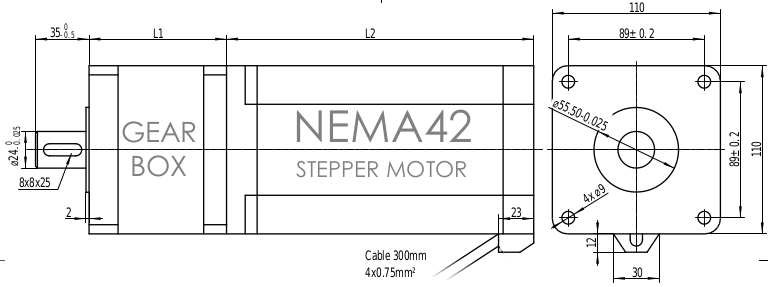
| Length L1 (mm) | 90 | 118 |
| Rated Torque (Nm) | 230 | 260 |
| Peak Torque (Nm) | 460 | 520 |
| Efficiency (%) | 96 | 94 |
| Backlash (arcmin) | <15 | <25 |
| Gearbox Weight (kg) | 2 | 2.5 |
| Rated Input Speed (rpm) | 3000 | 3000 |
| Max Input Speed (rpm) | 5000 | 5000 |
| Protection (IP) | 65 | 65 |
| Lubrication | Grease | Grease |
| Noise Level (dB) | <45 | <45 |
| Life Time (hours) | 20000 | 20000 |
| Stepper | Rated Torque (Nm) | Rated Current (A) | Inertia (kg.cm2) | Resistance phase (Ohm) | Inductance phase (mH) | Length L2 (mm) | Motor Weight (kg) |
| NEMA42-1155 | 11 | 5.5 | 108 | 0.72 | 10.9 | 99 | 5 |
| NEMA42-1260 | 12 | 6 | 132 | 0.44 | 7.17 | 115 | 6.2 |
| NEMA42-2065 | 20 | 6.5 | 210 | 0.72 | 12.8 | 150 | 8.4 |
| NEMA42-2460 | 24 | 6 | 240 | 0.9 | 16 | 168 | 9.8 |
| NEMA42-3380 | 33 | 8 | 330 | 0.71 | 15.38 | 201 | 11.7 |
Torque at Gearbox Output Shaft for various Gear Ratios of Planetary Gearbox and Input Torque of Stepper Motor.
| Torque | M motor | M i=4 | M i=5 | M i=8 | M i=16 | M i=20 | M i=25 | M i=32 | M i=40 | M i=64 |
| Motor | Nm | Nm | Nm | Nm | Nm | Nm | Nm | Nm | Nm | Nm |
| NEMA42-1155 | 11 | 42 | 53 | 84 | 165 | 207 | 259 | 331 | 414 | 662 max 520 |
| NEMA42-1260 | 12 | 46 | 58 | 92 | 180 | 226 | 282 | 361 | 451 | 722 max 520 |
| NEMA42-2065 | 20 | 77 | 96 | 154 | 301 | 376 | 470 | 602 max 520 | 752 max 520 | 1203 max 520 |
| NEMA42-2460 | 24 | 92 | 115 | 184 | 361 | 451 | 564 max 520 | 722 max 520 | 902 max 520 | 1444 max 520 |
| NEMA42-3380 | 33 | 127 | 158 | 253 | 496 max 460 | 620 max 520 | 776 max 520 | 993 max 520 | 1241 max 520 | 1985 max 520 |
For a selected Gearbox with seleted Stepper Motor is possible to generate a Torque Speed curve to check the real beaviour of Gearbox Torque at higher speeds. Above table shows the Torque at low speed and with rising speed the motor/gearbox torque is going down. For specific customer application request we can optimize a combination of stepper motor and Planetary Geargox for specific working point ( Torque and Speed ).
 Request Quote
Request Quote
