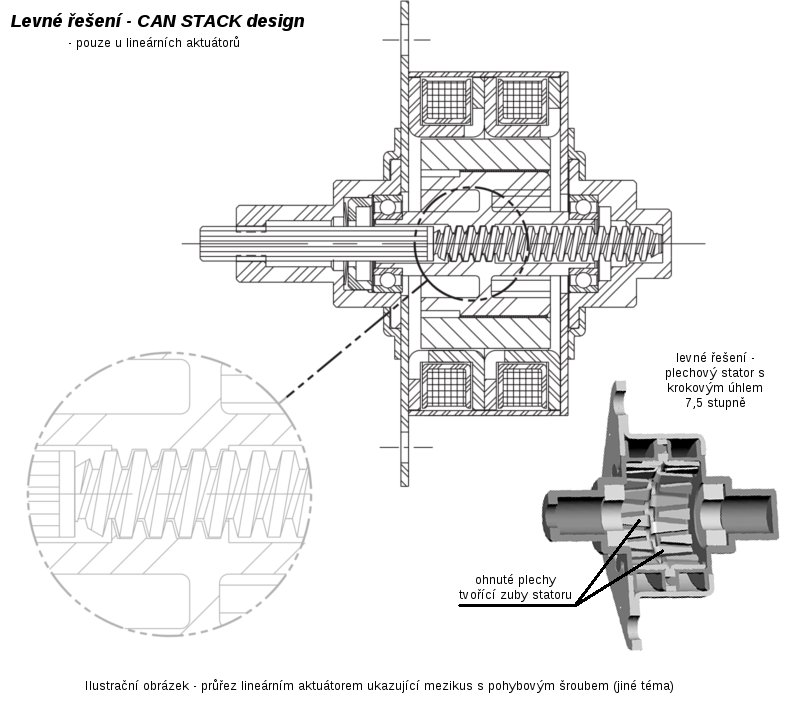
Co je to krokový motor a jak funguje ? Krokový motor - Hybridní krokový motor Levnější varianta krokového motoru - CAN STACK Použití enkodéru ke zjištění polohy a rychlosti Vyzkratované nebo spálené vinutí krokového motoru. Rychlé krokové motory pro vysoké rychlosti otáčení Počet kroků na otáčku pro krokové motory s 0,45°, 0,9° a 1,8° úhlem Elektrické zapojení krokových motorů se 4, 6 a 8 vodiči Zastaralé technologie - L/R budiče a napěťové budiče Výhody použití krokových motorů Konstrukce speciálního krokového motoru - Maximalizování momentu na požadované rychlosti Elektrické schéma krokového motoru Různé krokové úhly krokových motorů Rozdíl mezi bipolárními a unipolárními krokovými motory Co je potřeba, aby se krokový motor otáčel ? Různé typy budičů pro krokové motory Co je to mikrokrokování a jak funguje Využití mikrokrokování: Průběh proudu při mikrokrokování Mikrokrokování - magnetický tok jako gumová páska Jaký je rozdíl mezi polovičním a plným vinutím (Half-Coil - Full-Coil) ? Úhel 1,8 nebo 0,9 stupně pro krokový motor. Unipolární nebo bipolární Přídržný moment a dynamický moment (moment na zrychlení/zpomalení) Jmenovitý proud a špičkový proud Odvod tepla z krokového motoru Jaké napětí pro krokový motor použít ? Jak na připojení krokových motorů Standardní zapojení krokových motorů Jaká je Váš nejpřesnější krokový motor ? Proč je možné provozovat krokové motory na větších napětích než jaké jsou v katalogu ? Mikrokrokování Bude se krokový motor přehřívat pokud pokud bude něco držet ? CE a UL certifikace krokových motorů ? Jaký je rozdíl mezi budičem R701 a R710 ? Krokový motor má rezonanci na požadované rychlosti Co mohu v změnit ve své konstrukci, aby se snížila rezonance ? Proč proud ovlivňuje nižší rychlosti a napětí vyšší rychlosti ?
Co je to krokový motor a jak funguje ? Krokový motor - Hybridní krokový motor Levnější varianta krokového motoru - CAN STACK Použití enkodéru ke zjištění polohy a rychlosti Vyzkratované nebo spálené vinutí krokového motoru. Rychlé krokové motory pro vysoké rychlosti otáčení Počet kroků na otáčku pro krokové motory s 0,45°, 0,9° a 1,8° úhlem Elektrické zapojení krokových motorů se 4, 6 a 8 vodiči Zastaralé technologie - L/R budiče a napěťové budiče Výhody použití krokových motorů Konstrukce speciálního krokového motoru - Maximalizování momentu na požadované rychlosti Elektrické schéma krokového motoru Různé krokové úhly krokových motorů Rozdíl mezi bipolárními a unipolárními krokovými motory Co je potřeba, aby se krokový motor otáčel ? Různé typy budičů pro krokové motory Co je to mikrokrokování a jak funguje Využití mikrokrokování: Průběh proudu při mikrokrokování Mikrokrokování - magnetický tok jako gumová páska Jaký je rozdíl mezi polovičním a plným vinutím (Half-Coil - Full-Coil) ? Úhel 1,8 nebo 0,9 stupně pro krokový motor. Unipolární nebo bipolární Přídržný moment a dynamický moment (moment na zrychlení/zpomalení) Jmenovitý proud a špičkový proud Odvod tepla z krokového motoru Jaké napětí pro krokový motor použít ? Jak na připojení krokových motorů Standardní zapojení krokových motorů Jaká je Váš nejpřesnější krokový motor ? Proč je možné provozovat krokové motory na větších napětích než jaké jsou v katalogu ? Mikrokrokování Bude se krokový motor přehřívat pokud pokud bude něco držet ? CE a UL certifikace krokových motorů ? Jaký je rozdíl mezi budičem R701 a R710 ? Krokový motor má rezonanci na požadované rychlosti Co mohu v změnit ve své konstrukci, aby se snížila rezonance ? Proč proud ovlivňuje nižší rychlosti a napětí vyšší rychlosti ?Princip si vysvětlíme na bipolárními krokovými motory, který tvoří současný průmyslový standard. Ať už ve verzi unipolární nebo bipolární.
Krokový motor se skládá z několika částí :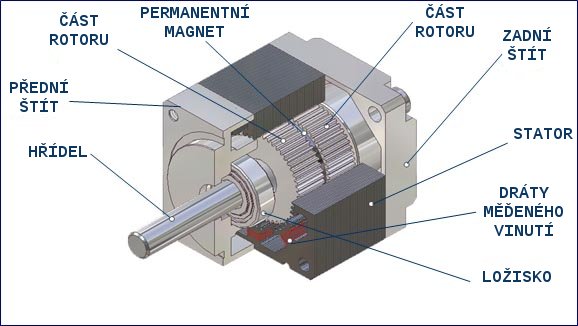
Krokové motory jsou používány v polohovacích aplikacích, které vyžadují přesné pohyby a potřebují při zastavení držení v určité poloze bez ztráty polohy. Různé přírustky proudu jsou dodány do vinutí, aby motor krokoval. Pokud se motor zastaví tak se nepřehřeje ani zničí. Motoru je také možné nechat MIKROKROKOVAT, nebo krokovat po přírůstcích tak malých jako 0,0035°, takže pokud přesné polohování jsou to co potřebujete nejlevnější variantou je použít krokový motor.
Normální střídavé nebo stejnosměrné motory pracují s trvalým vstupe napětí a většinou vytvářejí nějaký trvalý ustálený stav - trvalý rotační pohyb. Na připojení takových motorů typicky stačí dva dráty, jedním teče proud do motoru a druhým ven.


Oproti těmto motorům, krokový motor ( krokující motor, "krokáč" ) nebude produkovat trvalý pohyb při připojení trvalého vstupního napětí. Zůstane v určité poloze, tak dlouho dokud bude připojeno napájení. Elektrická změna fáze je nutná, aby se krokový motor mohl pohybovat. Neexistuje žádný krokový motor jenom s jednou fází, vždycky má alespoň dvě.
Běžný krokový motor má vinutí, které můžeme chápat jako dlouhé dráty s určitým odporem a indukčností. Do nich spínače zapínají a vypínají proud, aby se motor pohyboval po krocích.
Zapnutím jedné fáze se motor natočí do jedné polohy (zadržovací polohy). Vypnutím proudu v této fázi a zapnutím v druhé, přesune rotor do druhé zadržovací polohy. Tomuto zapínaní a vypínání proudu se říká puls. Jeden puls způsobí, že se motor otočí o jeden přesně daný úhel. Tento pohyb je opakován s každým vstupním pulsem, aby bylo možné vytvořit trvalý rotační pohyb.
Pokud jsou elektrické pulsy vhodně přivedeny a řízeny, počet výstupních mechanických otočení (kroků) je vždy roven počtu vstupních pulzů.
Rotor může být držen v určité poloze trvalým napájením jedné fáze. Motor vytváří určitý přídržný moment, který může být použit na držení aplikace na jednom místě. Pokud se stane, že motoru spadne něco do cesty (na motor přicházejí pulsy motor se motá, ale nějaký objekt mu zablokuje cestu), motor neshoří. Pulsy budou pořád přicházet a vypínat a zapínat vinutí. Odebíraný výkon se nebude zvyšovat jako u běžných střídavých nebo stejnosměrných motorů a motor neshoří.
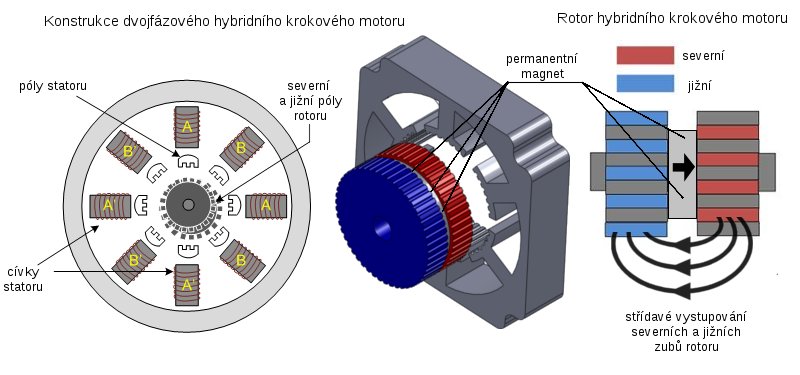
Hybridní znamená, že tento motor v sobě kombinuje dva typy motorů - reluktanční (variable reluctance ) a motor s permanentními magnety(PM Motor)
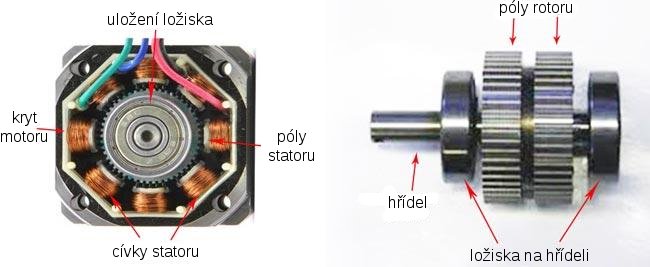
Hybridní krokový motor má vinutí ve statoru, permanentní magnet mezi částmi rotoru, a vzduchovou mezere mezi rotorem a statorem. Kuličková ložiska jsou pak jediným kontaktem při otáčení motoru.
Pokud bychom vzali krokový motor položili ho na stůl, nechali hřídel směřovat vzhůru a sestupně ho rozřízli. Řez krokovým motorem, pohled na vzduchovou mezeru mezi rotorem a statorem ve směru hřídele.:
Sepnutí fáze A způsobí magnetický tok (zobrazen růžovou). Proud teče vinutím, které je v tomto případě 4fázového motoru navinuto na každé 4-té fázi. Permanetní magnet rotoru vytváří magnetické pole se severním a jižním pólem, tento tok tekoucí zuby bude rotorem otáčet tak, aby ho strovnal s magnetickým tokem do vinutí.
Vypnutím fáze A a sepnutím fáze B je motor nucen se srovnat s fází B. Každé takové přepnutí fází způsobí, že se motor bude pohybovat po malých přírůstcích. Po čtyřech takových změnách se rotor posune o jednu celou délku kroku.
Většina výrobců krokových motorů vyrábí krokové motory s 0,45°, 0,9° a 1,8°. Což znamená :
Jedna otáčka má 360°. Aby se posunul jeden zub jsou potřeba 4 mechanické fáze. Jinými slovy počet plných kroků nutný k mechaniskému vyrovnání zubu. Na posun o jeden zub jsou potřeba 4 mechanické fáze. Jinými slovy počet plných kroků nutných, aby se zopakovalo stejné mechanické nastavení mezi zuby statoru a rotoru.
U krokového motoru s 1,8° (každý krok posune rotorem o 1,8°) je 50 mechanických zubů na rotoru. Potom za jednu otáčku tj. 360°, 50 zubů krát 4 mechanické fáze tj nebo 200 po vydělení vyjde 1,8°
PZ = # počet zubů
PUK = # Plný úhel kroku
PMF = # počet mechanických fází
PUK = 360° / (PMF x PZ)
PUK = 360° / (50 x 4) = 1,8° # na plný krok
nebo
PZ = 360° / (PUK x PMF)
PZ = 360° / (1,8 x 4) = 50 zubů
Proto existují jen určité realizovatelné krokové úhly. Například 5-fázový bipolární krokový motor má 10 mechanických fází. Ale 3-fázový unipolární krokový motor má 3 mechanické fáze.
Bi = dva
Uni = jedna
Co to znamená, když se mluví o bipolárních a unbipolárních krokových motorech ?
Bipolární krokový motor je takový, který má 4 vodiče. Označují se jako fáze A a fáze B. Fáze A se dělí na A a non-A (A s čárkou nahoře). Stejně tak fáze B.
Když se navíjí bipolární motor, začnete s vodičem řekněme A. Ten je navinut okolo každého druhého statorového pólu, až do konce, pak je vytažen a označen jako non-A (A s čarou). Což znamená, že A a non-A je jeden jediný dlouhý vodič. To stejné se provede s vodičem pro vázi B, který je omotán okolo zbývajících pólů.
Když do vodiče A vstoupí elektrický puls, projde jím a vystoupí z non-A.
Bipolárním motorem teče proud oběma směry: jak vtékající do A a vytékající z non-A, tak do non-A a z A. Proto "Bi" - bipolární - proud tekoucí oběma směry.
Zjednodušeně lze krokový motor znázornit takto: dvě oddělené vinutí znázorněné cívkou. Kružnice představuje rotor a vinutí jsou znázorněny tak, že můžete vidět dvě oddělené fáze: A a B. Proud může téci oběma směry.
Unipolární motory mají vždy proud tekoucí pouze jedním směrem. Ale mají 6 vodičů. Při navíjení vinutí unipolárního motoru se postupuje stejně jak u bipolárního navíjí se jeden vodič od A skrze póly statoru, ale v polovině navíjení se vyvede jeden ven z motoru, pak se pokračuje dál a vyvede se non-A. Stejně tak u fáze B.
Proud vždy teče jedou z fází do motoru a společným vodičem (zvaným také společná zem) ven z motoru. Proud potom teče vždy od plus k mínus a společným vodičem teče vždy ven. Aby unipolární motor začal krokovat, je potřeba přepínat tok proudu podobně jako u bipolárního motoru. Ale je to vždy jen přepínání mezi polovinou A a polovinou B fáze. Budič potom potřebuje polovinu tranzistorového H můstku (což vedlo v minulosti díky drahým tranzistorům k masivnímu nasazení). U unipolárního motoru je buzena pouze jedna celá cívka najednou kdežto u bipolárního je jsou vždy zároveň buzeny obě cívky.
Jsou zde dva důvody, proč těmto motorům říkáme bipolární a unipolární
| Unipolární | Bipolární |
| Uni = jedna | Bi = dvě |
| Proud teče jedním směrem | Proud teče oběma směry |
| Buzena jedna cívka | Dvě cívky buzeny současně |
Unipolární motoru může být v podstatě zapojen jako bipolární motor. Jsou zde dvě možnosti. Sériové zapojení bude znamenat kombinovat obě sekce sériově. Pokud prostě vynecháme střední vývody (společnou zem) tak bude vypada jako bipolární vinutí.
Jiné připojení je zvané zapojení poloviny vinutí. Je používáno, když chceme simulovat funkci unipolárního motoru a máme k dispozici pouze bipolární budič. Prostě ignorujeme vodiče non-A a non-B a jsme zpět u 4 vodičového zapojení a využíváme pouze polovinu vinutí.
Každý krokový motor potřebuje budič (angl. stepper driver). Existuje několik druhů budičů. Unipolární budič je potřeba na unipolární motor a bipolární budič je potřeba na bipolární motor.
Aby bylo možné vypínat a zapínat proud tekoucí fázemi, musí být použity nějaké spínače - tranzistory.
|
|
|
|
Takto vypadá tranzistor, báze ovládá množství proudu, |
V podstatě je to spínač, |
Téměř všechny bipolární budiče používají H-můstek, kde 4x tranzistory jsou nutné na jednu fázi motoru.
Nejběžnější bipolární driver je CHOPPER budič s PWM technologií (Pulse Width Modulation - Pulsní šířková modulace.).
Chopper budič bude sekat (chop angl. useknout vstupní stejnosměrné napětí. Vstupní napětí bude spínáno a vypínáno, aby byl omezen proud na nastavenou hodnotu. Toto je také známo jako systém s řízeným proudem.
Budič dovolí nastavit proud na určitou hodnotu. Po tom co je posláno například 24VDC, zůstane sepnut dokud proud nedosáhne nastavenou jmenovitou hodnotu proudu. Pak bude 24VDC vypnuto a sepnuto znovu až spadne pod určitou mez.
Pokud se u krokového motoru udává i napětí, je to prostě pouze kvůli Ohmovu zákonu U = I x R. Použité vinutí má definovaný odpor a proud, aby nepřekročilo maximální ztrátový výkon (R x I²). Proto je u některých motorů uvedeno i napětí. To neznamená, že není možné toto napětí překročit. Je to kvůli technologie CHOPPER budiče. Daleko důležitější je nepřekročit proudové dimenzovaní.
Jakýkoliv krokový motor může být mikrokrokován. To je proto, že MIKROKROKOVÁNÍ je funkcí budiče. Budič určuje, jak moc nebo málo proudu poteče vinutími motoru. Určitý poměr proudů do fází A a B donutí motor krokovat i do oblastí, kam by se přirozeně nedostal.
Například, když máte krokový motor s 1,8°, na každý, krok, který udělá se posune o 1,8°. Bude potřebovat 200 kroků, aby vykonal jednu celou otáčku (360° / 1.8° = 200 kroků na otáčku).
Pokud nastavíte budič na půlkrok, každý krok je potom 0.9°. (1.8° / 2 = 0.9°) Potom motor potřebuje 400 kroků na jednu kompletní otáčku.
Pokud nastavíte budič na čtvrtkrok, nebo také nazývané 4x mikrokrokování, každý krok je potom 0.45°. (1.8° / 4 = 0.45°). Potom potřebuje 800 kroků na jednu kompletní mechanickou otáčku.
Maximální rozlišení kroku používané v průmyslu je 256x mikrokrokování. Jeden krok je potom 0.007° se standardním 1.8° krokovým motorem. Pokud použijete speciální 0.9° krokový motor a nastavíte budič na mikrokrokování 256x, každý krok bude potom 0.0035°.
1. Aplikace vyžaduje, aby se motor zastavil po velmi malých inkrementech, které nemohou být dosaženy plně krokujícím motorem.
2. Aplikace vyžaduje hladký pohyb a díky pohybu po malých přírůstcích, oscilace vznikající při každém kroku jsou malé a krátké.
3. Aplikace požaduje méně hluku. Malé oscilace na krok nedovolí motoru, aby rezonoval a vytvářel hluk.
Obrázek ukazuje plný krok. Proud fází A při plném kroku. (žadné mikrokrokování - 1x mikrokrokování). Fáze A bude sepnuta po dva kroky a pak po dva kroky vypnuta. Takhle se to opakuje pořád.
Fáze B vypadá stejně, s tím že jsou pouze doby, kdy je zapnuta a vypnuta posunuty.
Takto vypadá poloviční krok (2x mikrokrokování). Dodáváním různého proudu do fází donutí motor krokovat mezi přirozené polohy plného kroku.
Představte si magnetický tok jako gumovou pásku. Protože krokové motory obsahují uvnitř rotoru magnet, vinutí je navinuté okolo železných pólů, magnetické pole je vytvářeno tak, aby nutilo motor se otáčet a dokonce držet v takové poloze navždy.
Představte si magnetický tok jako gumovou pásku, držící zub statoru a rotoru staženými k sobě, protože je natažena mezi nimi.
Když je fáze A zapnuta a B vypnuta, rotor a stator jsou stabilně v jedné poloze. Jakmile se potom fáze A vypne a fáze B zapne natáhne se magnetický tok (a pomyslná gumová páska) na obrázku uprostřed. Stejně jako gumová páska se magnetický tok stáhne do tvaru, kdy má nejmenší energii. Nyní je stabilní v poloze B. Tímto způsobem motor udělá jeden krok.
Při první poloze #1 je fáze A na 100% dostává plný krok (modrá křivka). Fáze B má nulový proud (zelená křivka). Obrázek nahoře zobrazuje situaci, kdy je rotor stabilní na poloze A.
K nastavení rotoru na ¼ cesty od A do B na polohu 2, musí fáze A získat dvakrát tolik proudu než fáze B. Modrá a zelená křivka jsou v poměru 2:1.
K nastavení rotoru přesně mezi do poloviny mezi A a B, musí obě fáze získat stejné množství proudu. Křivky mají stejnou hodnotu a rotor je v poloze 3.
Toto odkazuje na 6-ti vodičový motor (unipolární krokový motor), který je použit s bipolárním budičem. Protože bipolární motory potřebují ke svému provozu pouze 4 vodiče, existují různé možnosti připojení 6-ti vodičový motor k bipolárnímu budiči. Typicky se 6 vodiče označují jako (A, A-společný, non-A, B, B-společný, non-B).
Potom zapojení s polovičním vinutím (Half-Coil) by bylo připojení pouze poloviny vinutí. Tj použití jen vodičů A a A-společný a B a B-společný (nebo A-společný a non-A a B-společný a non-B).
Pro využití plného vinutí (Full-Coil) nebo také tzv. sériového spojení by byli použity vodiče A a non-A a B a non-B a společné vodiče (vyvedení středu vinutí - společná země) by byli kompletně nevyužité.
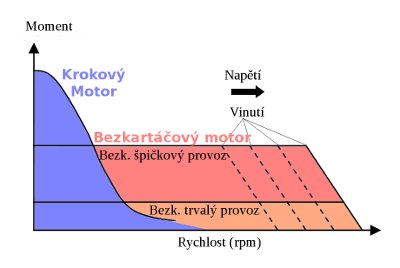
Plné vinutí (sériové spojení) je ideální pro zvýšení momentu na nižších rychlostech. Poloviční vinutí dá menší moment rozložený po větších rychlostech.
Přesnost kroku je primární znak krokového motoru. Bez přesnosti kroku, je motor nepoužitelný. Záleží na výrobních možnostech, dosahovaná přesnost kroku je +/- 5% plného kroku. Což znamená, že 1,8 stupňový motor má přesnost +/-5,4 úhlové minuty a 0,9 stupňový má +/-2,7 úhlové minuty. Kroková přesnost motoru je určena momentovou tuhostí, a ta je zase určena maximálním držícím momentem a počtem zubů.Unipolární nebo bipolární
Momentová funkce motoru: M( Phi ) = Mo * Sin(N * Phi)
Tuhost momentu: dM( Phi )/d Phi = N * Mo * Cos (N * Phi)
(kde Mo=maximální držící moment, N=počet zubů na rotoru, =poloha rotoru)
krokový motor s úhlem 1,8 stupně má 50 zubů na rotoru s úhlem 0,9 stupně má 100 zubů na rotoru. Se stejnými výrobními možnostmi, bude mít 0,9 stupňový motor dvakrát vetší přesnost kroku.
Unipolární - Směr proudu unipolárního budiče nemůže být změněno. Každou fázi tvoří dvě různé cívky. Pouze jedna sada cívek může být vybuzena současně. Každá cívka představuje jednu fázi. A pouze 50% vinutí je využito v unipolárním pohonu. Počet mechanických fází se rovná počtu elektrických fází.
Protože unipolární budiče používají pouze 50% vinutí, dosahují daleko nižších výkonů. Výhodou je, že negenerují tolik tepla.
Bipolární - Směr proudu bipolárního budiče může být změněn. Plných 100% vinutí je využito. Což znamená, že obě sady cívek mohou být zapojeny buď v sérii nebo paralelně a vytvářet jednu cívku. Schopnost budiče měnit směr proudu vytváří další mechanickou fázi. Počet mechanických fází je dvojnásobkem počtu elektrických fází. Bipolární budiče zajišťují o 40% více přídržného momentu než unipolární, ale typicky se provozují na vyšších teplotách. Z tohoto důvodu je vhodný odvod tepla důležitý u bipolárních budičů.
Přídržný moment je maximální obnovovací moment vytvořený rotorem, pokud je jedna nebo více fází buzeny. Dynamický proud (také zvaný rozběhový nebo brzdný moment (zrychlení/zpomalení). Má různou hodnotu podle rychlosti, technologii budiče a výkonového vstupu. Zhruba se dá říci, že maximální dynamický moment je 70% přídržného proudu.
Jmenovitý proud je to na co je motor dimenzován. Špičkový proud ukazuje na množství proudu, které je budič schopen dodávat. Při použití budiče, který umí jen poloviční nebo plný krok (mikrokrokování 1x nebo 2x), je jmenovitý proud stejný jako špičkový proud. jmenovitý proud = špičkový proud. Motor by se mohl zastavit v pozici, kde mají obě fáze amplitudu (tj. maximum).
Při použití mikrokrokovacího budiče s mikrokrokováním 1/4 a větším, špičkový proud je 1,4x jmenovitý proud. Mikrokrokující budiče jsou postaveny jiným způsobem, aby byly schopny maximalizovat svou schopnost budit motor. Proto jsou krokové motory schopné snést 1,4x násobek svého jmenovitého proudu - amplitudu efektivní hodnoty - špičkový proud = 1,4 x jmenovitý proud. Toto nezničí motor, protože jde o výkonově stejné namáhání
Ne mikrokrokující budiče: špičkový proud = jmenovitý proud
Mikrkokrokující budiče: špičkový proud = 1,4x jmenovitého proudu
Krokový motor je dimenzován na určitý odvod tepla, který odvede ztráty vytvořené proudem na odporu motoru (R*I^2). Větší motor může odvádět více tepla než malý motor. Takže dimenzovaní většího motoru může být daleko větší než malého motoru o stejněm odporu fáze. Motor namontovaný na dobrou tepelně vodivou část může odvádět více tepla než motor připojený na tepelně méně vodivý materiál. Takže dimenzování proud může být větší pokud je k dispozici lepší odvod tepla.
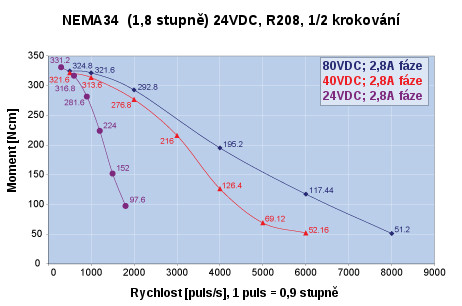
Aby bylo možné získat maximální výkon z daného motoru pro dano aplikaci, je možné maximalizovat moment pro danou pracovní rychlost. Vybrat správnou rychlost je velmi výhodně pro optimální návrh motoru. Při rychlosti 1000 plných pulsů za sekundu není vhodné použití napájecího napětí menšího než 12V. Vyšší napětí než 24V by bylo nutné, pokud pracovní rychlost přesáhne 4000 pps - pulsů za sekundu.
Servo-Drive může navrhnout vhodný motor pro vaši aplikaci, pracovní rychlost, napájecí napětí a napájecí proud, který je budič schopen dodávat.
Existuje několik jednoduchých kroků jak správně připojit motor k budiči.
1. Zjistěte kolik vodičů váš motor má 4, 6, nebo 8 vodičů. Zjistěte barevné označení vodičů.
2. Vyhledejte si popis vodičů v následující tabulce nebo obrázcích. Tabulka ukazuje 4 hlavní používané barevné kódy rotačních krokových motorů. Obrázky ukazují barevný kód a spínací sekvence pro lineární krokové motory.
3. Připojte podle barevného kódu vodiče na vhodné výstupy budiče. Pokud máte bipolární budič, budou označeny A, A-, B, B-.
Například, pokud budete mít barevný kód z prvního řádku tabulky, červený vodič bude připojen na A, modrý na non-A, zelený na B a černý na non-B.
Pokud máte unipolární budič, budou výstupy označeny A, B, C, D, a A/C Common a B/D Common.
| kód č.1 | Red | Blue | Green | Black |
| kód č.2 | Brown | Orange | Red | Yellow |
| kód č.3 | Red | Red/White | Green | Green/White |
| Bipolar Driver | A | A- | B | B- |
NEMA 17-xxxx-09DEG-HR s krokovým úhlem 0.9°. patří k velmi přesným krokovým motorům.
Velmi přesný krokový motor EMA 17-xxxx-09DEG-HR :Oba budiče mají vždy na výstupu 10x mikrokrokování. R710 má zabudovaný násobič krokových pulsů. Pokud je JUMPER násobiče nastaven do módu plného kroku "Full Step Mode" budou přicházející pulsy násobeny 10-ti. Toto umožňuje zákazníkům změnu pohonu na mikrokrokování bez přeprogramování všech rychlostí. R710 bude automaticky násobit krokovací pulsy, aby dosahoval stejných rychlostí, ale teď to bude pohon s mikrokrokování se všemi výhodami, které z toho plynou.
Mód plného kroku "Full Step" bude násobit přicházející pulsy 10-ti.Každý krokový motor má rezonanční bod. Je to dáno způsobem vykonání kroku, rotor vždy osciluje než se ustálí v nové poloze. Pokud se frekvence kroků bude blížit frekvenci vznikajích oscilací, dostane se motor do rezonance a bude hlasitě vibrovat, přeskakovat a ztrácet kroky.
Frekvence závisí na momentové tuhosti a momentu setrvačnosti. Změnou jednoho z těchto parametrů, můžeme změnit rezonanční frekvenci, tak, aby se objevila buď na malých nebo velkých rychlostech.
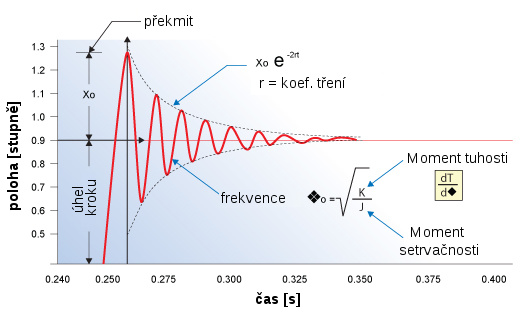
Rovnice nahoře ukazuje, kam se posune rezonanční frekvence. Pokud se zvýší horní část zlomku 'K', frekvence se posune do vyšších rychlostí. Pokud se zvýší spodní část 'J', přesune se rezonanční frekvence do nižších hodnot.
Rychlé projetí po 'rampě' skrze malé rychlosti, může vyřešit mnoho problému s rezonancemi na nízkých rychlostech. Stačí nastavit budič/kontroller na vyšší hodnotu zrychlení.
Krokové motory se otáčejí díky přepínání proudů z fáze do fáze. Na malých rychlostech, proud který poslán do motoru musí narůst a klesnout (viz nárůst proudu v cívce a elektrická časová konstanta daná indukčností a odporem). Na pomalých rychlostech by měl mít každý puls dostatek času, aby plně narostl na plnou hodnotu a zase klesnul. Motor bude vydávat maximální výkon a to je důvod, proč budou mít momentové křivky největší moment na malých rychlostech.
Jak rychlost roste, není dostatek času na to, aby proud kompleně narostl a zase klesnul. Na vyšších rychlostech můžete pak dostat 50% proudu do motoru.
Napětí je prostředek, který umožňuje proudu téci rychleji nebo pomaleji. Pokud se zvýší napětí tlačí se do motoru více proudu. Potom je místo natlačení 50% proudu do motoru možné tam dostat 60 - 75% díky zvýšení napětí.
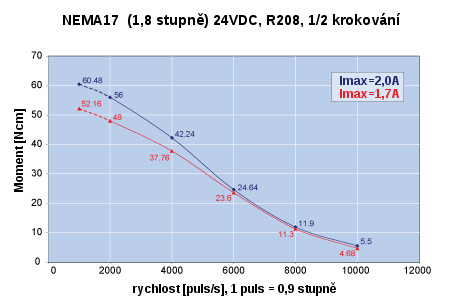
Obrázek dole ukazuje co dělají různá napětí a proudy s momentově rychlostními křivkami.